Contexte
1970 vs aujourd'hui
L'informatique personnelle a commencé dans les années 1970, l'Apple II était l'un des premiers produits grand public.
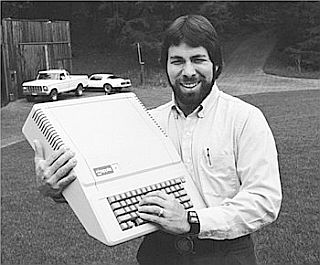
Steve Wozniak qui tient l'un des premiers ordinateurs personnels d'Apple.
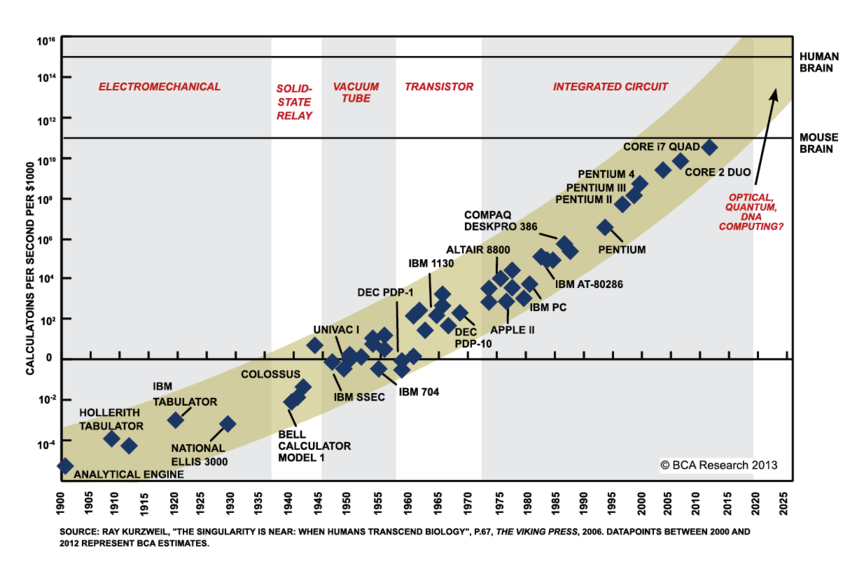
Loi de Moore
La loi de Moore est une observation empirique qui dit que le nombre de transistors dans un circuit intégré double tous les deux ans.
Performance vs confort des développeurs
La montée en puissance des ordinateurs n'a pas forcément eu que des effets positifs sur les logiciels. Les développeurs privilégient souvent la simplicité et la rapidité de développement à la performance.
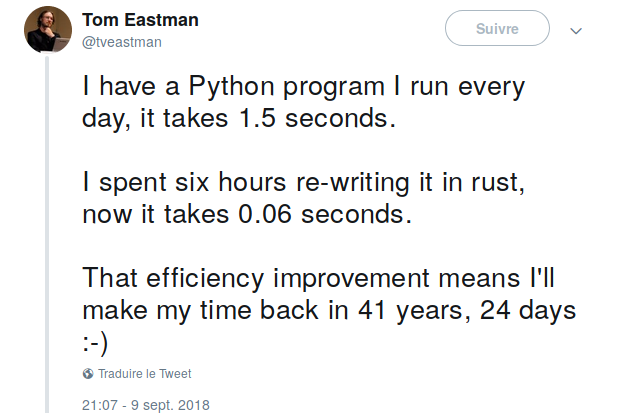
Désenchantement logiciel
Quelques constats fréquents:
- Les logiciels sont lents
- Windows 10 pouvait prendre 30 minutes à se mettre à jour...
- Le temps de réécrire 5 fois le SSD entièrement
- Pourquoi un smartphone met de 30 à 60 secondes à démarrer ?
- Les logiciels sont énormes
- Windows 95 pesait 30 Mo...
- ... l'application clavier de Google utilise 150 Mo de RAM
- Les logiciels sont vite obsolètes
![]() Billet de blog complet
(Nikita Tonsky, 2018)
Billet de blog complet
(Nikita Tonsky, 2018)
Pourquoi faire de l'embarqué ?
On peut mentionner plusieurs raisons pour informaticien d'apprendre à faire de l'embarqué:
- Reprendre contact avec le matériel et le bas niveau,
- Meilleure compréhension du fonctionnement des ordinateurs et des systèmes d'exploitation,
- Possibilité de fabriquer des objets physiques intégrant du code,
- Prise de conscience des performances et de la consommation de nos logiciels (avec 2KB de RAM, on peut quand même faire beaucoup de choses !).
Déroulé du cours
Nous allons partir à l'aventure dans les tréfonds des l'informatique, et nous allons apprendre à programmer des microcontrôleurs.
Ce cours développera vos compétences en:
- Compréhension de l'électronique (schémas, composants, bus bas niveau etc.),
- Programmation C bas niveau,
- Capacité à lire et comprendre les documentations techniques des composants,
- Compréhension du fonctionnement d'un microcontrôleur.
Le cours sera essentiellement illustré autour de l'ATmega328P, un microcontrôleur 8 bits très répandu dans le monde de l'embarqué.
Arduino
Nous utiliserons des cartes Arduino Uno rev3, mais nous n'utiliserons pas l'IDE Arduino, de manière à découvrir les aspects bas niveau de la programmation d'un microcontrôleur.
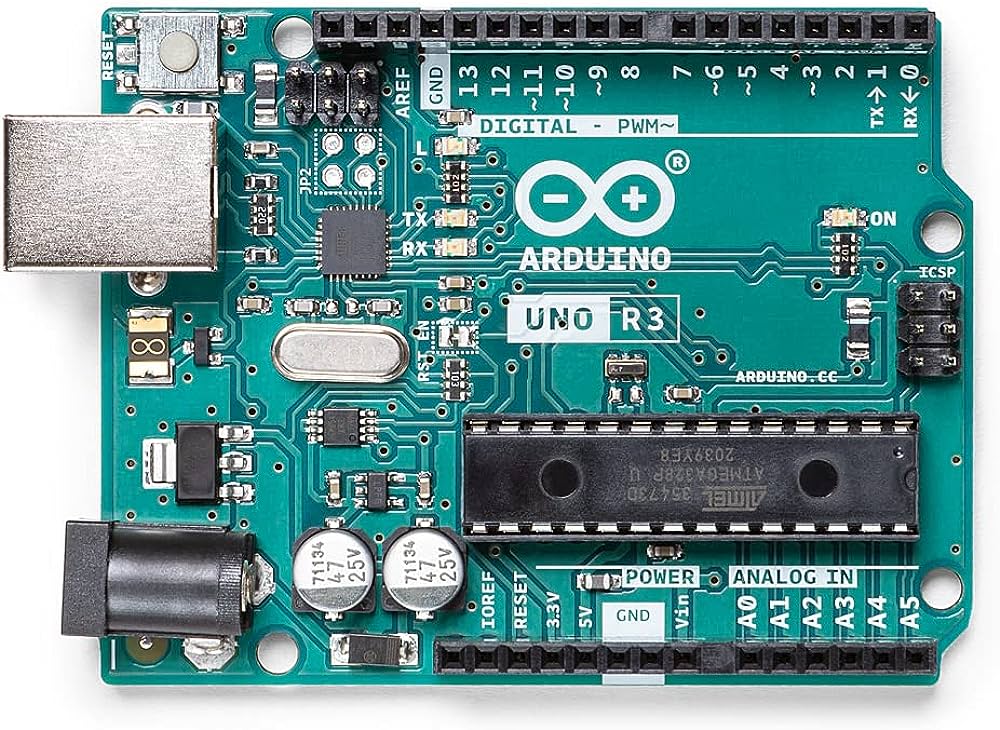
Nous vous invitons à tester Arduino en dehors de ce cours si vous en avez l'occasion!
Architecture
Tout commence par du sable
Les circuits intégrés sont fabriqués à partir de silicium, un matériau très abondant dans la nature. Ils sont gravé sur des disques de silicium appelés wafers.
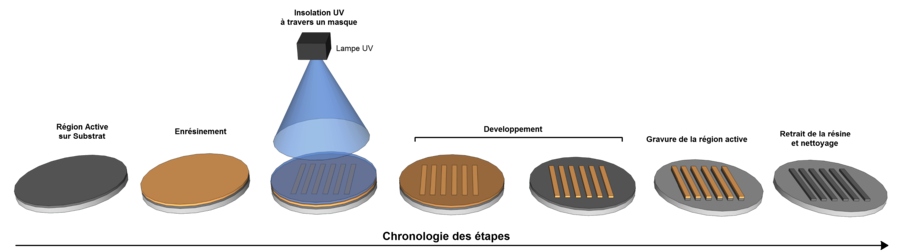
Ce processus optique se nomme la photolithographie.
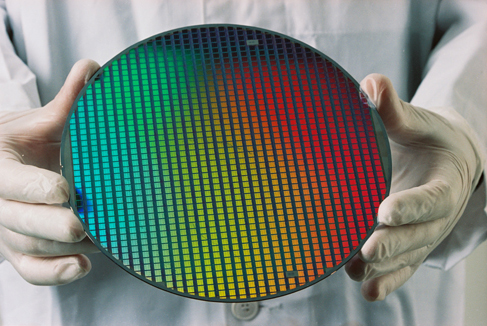
Ces galettes sont ensuite découpées en puces qui sont ensuite encapsulées dans des boîtiers:
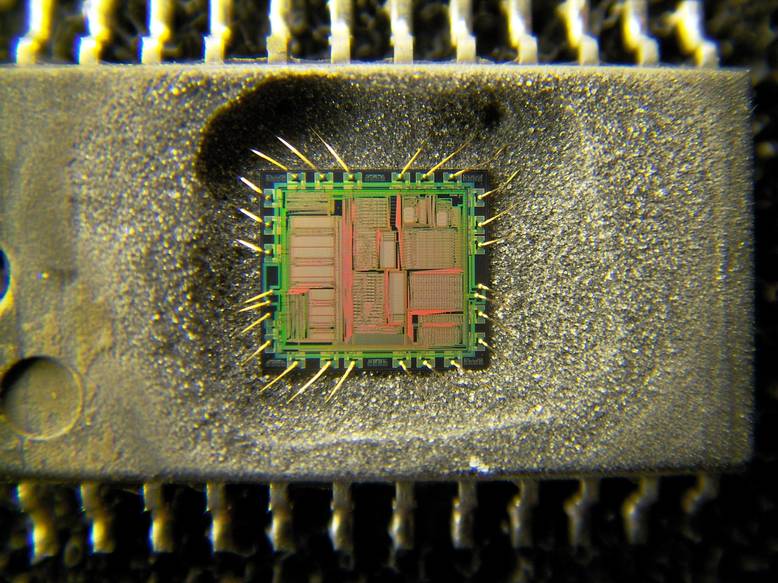
Avec un même wafer, le même circuit peut être vendu sous différentes formes (avec des boîtiers différents).
Le boîtier montré ci-dessus est "gros", ce qui peut être pratique pour le prototypage.
Ces composants sont alors soudés sur des cartes électroniques, que l'on appelle PCB (Printed Circuit Board):

Mémoire
Un microcontrôleur est composé de plusieurs types de mémoire:
![]() ROM (Read Only Memory)
ROM (Read Only Memory)
Stockage permanent (typiquement le programme),
Nécessite un effacement par bloc,
Limité en nombre d'écritures.ATmega328p: 32KB
![]() RAM (Random Access Memory)
RAM (Random Access Memory)
Mémoire volatile (perd son contenu à l'extinction),
Stockage temporaire (variables, pile, etc.),
Accès rapide,ATmega328p: 2KB
![]() EEPROM (Electrically Erasable Programmable Read-Only Memory)
EEPROM (Electrically Erasable Programmable Read-Only Memory)
Stockage permanent (typiquement configuration, numéros de série, etc.),
Peut être effacée par octet,
Limité en nombre d'écritures.ATmega328p: 1KB
Von Neumann vs Harvard
Il existe deux approches classiques pour l'architecture d'un microcontrôleur:
![]() Von Neumann
Von Neumann
Les données et le programme sont stockés dans la même mémoire.
![]() Harvard
Harvard
Les données et le programme sont stockés dans des mémoires séparées.Architecture de l'ATmega328p
Programmation
Avant toute chose, il est nécessaire de disposer de la documentation technique du microcontrôleur, que l'on appelle datasheet:
Il s'agit de la documentation technique du microcontrôleur que nous allons utiliser.
Le microcontrôleur est architecturé autour d'un bus de données de 8 bits, qui permet de transférer des données entre les différents composants du microcontrôleur:
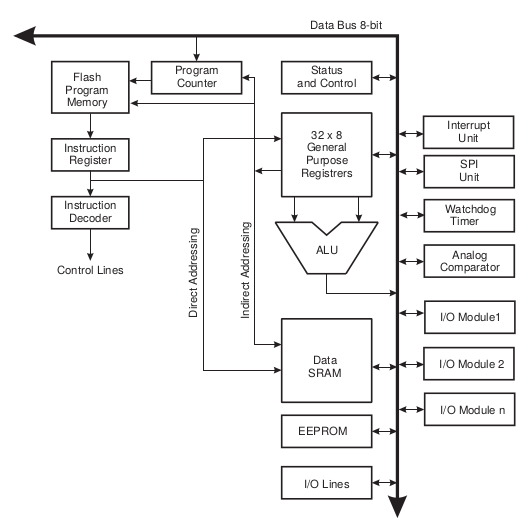
Datasheet de l'ATmega328P, Page 9
Registres
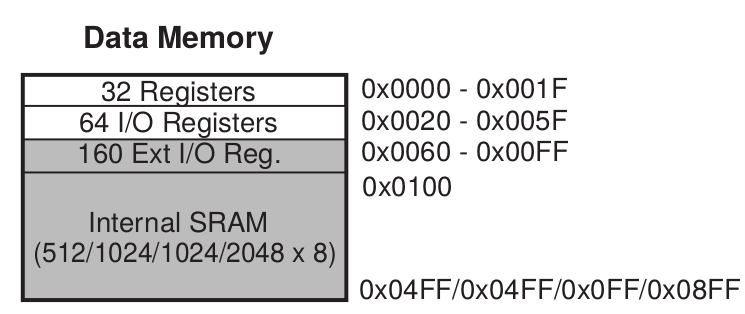
Datasheet de l'ATmega328P, Page 18
Les adresses mémoires inférieures à 0x0100 sont réservées aux registres du microcontrôleur. Ces
adresses se comportent comme de la mémoire, mais ont des fonctions spécifiques.
La RAM commence à l'adresse 0x0100.
Un exemple: les broches d'entrée/sortie
Afin d'écrire notre premier firmware, nous pouvons par exemple choisir de contrôler les broches du microcontrôleur.
Ces dernières sont regroupées par lot de 8 dans des ports (PORTB, PORTC, PORTD).
La LED de la carte Arduino est par exemple connectée à la broche PB5.
Les registres DDRx permettent de configurer les broches d'un port en entrée ou en sortie, et
les registres PORTx permettent de configurer les broches d'un port en niveau haut ou bas.
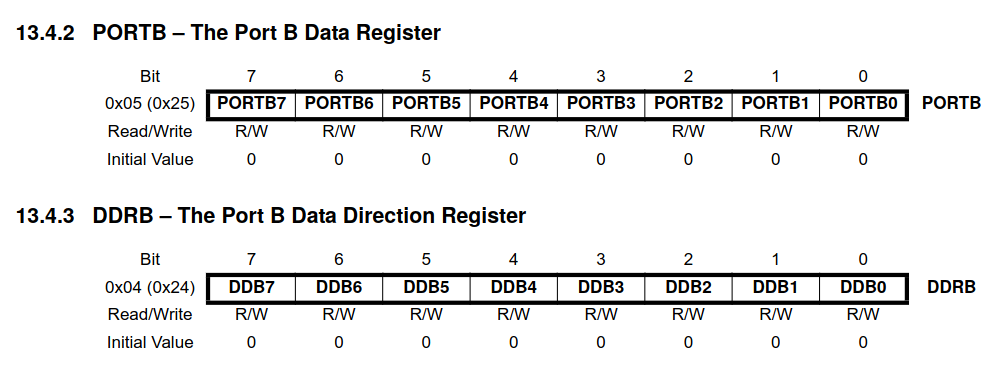
Datasheet de l'ATmega328P, Page 72