When it reaches the end of the track, it will follow the next one:
2021-2022 Colors to be defined
2) Go To
Robot will be put on a known initial position (for example a cross marked on the ground),
we will then provide a goal position and orientation \(x, y, \theta\) (using international
system units which are meters and radians).
The robot should move to reach this position/orientation.
3) Odometry
Robot will be moved (using "passive wheels" mode) on the round.
After some time, you will indicate where the robot is located relative to its initial position ($$x, y, \theta$), using only the motor encoders.
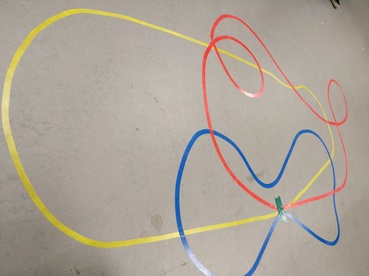
4) Drawing the map
After following the line of challenge 1, the robot will produce a skyview map
(image) of the track.
Guide
Here are the methods we recommend implementing for the odometry part:
Takes as parameters the position and orientation of the robot in the world frame, the
variation of the robot position and orientation in the robot frame, and returns new position and
orientation of the robot in the world frame