Hardware
Robot's frame

In this project, you will use MX-12W motors
- 2 motors with reducers and encoders
- Mechanical fixation brackets
- A LiPo 3S
- It's up to you to make the frame !
Communication board

You will use an USB/UART adapter USB2AX to communicate with servomotors
- Adapting USB to UART
- Handling half-duplex communication
- 3 points Molex connector
CPU
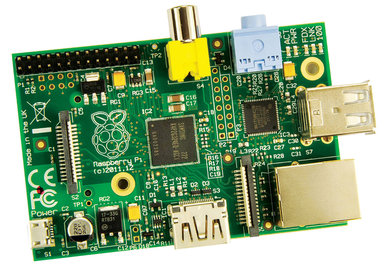
Onboard, we will use a Raspberry Pi, which is basically a small computer low-cost but powerful. It includes:
- ARM processor with four cores at 1.2 Ghz
- 1GB of RAM
- An operating system, namely Debian installed on an SD card
- USB and Ethernet ports
- Note: Pros don't need a screen and a keyboard :-)
This is where you will program the decisions made by the robot. Its computing power is an asset to analyze an image (although more limited than your laptop).
Camera

Finally, we will install a camera:
- Can capture up to HD 720p
- Linux and OpenCV compliant
- Can lower the resolution to increase frequency
This camera will be plugged to the Raspberry Pi to extract images and drive the robot
Software
PyPot
- Python library
- Can communicate with Dynamixel based servomotors
- registers read/write oriented protocol
- Servomotors identified by software IDs
Debian (Raspbian)

Debian is a widespread operating system, it will be the one we will use on our Raspberry Pi.
- It is a Linux distribution
- There is a special version optimized for Raspberry Pi
- It is very famous and used (Ubuntu is based on it)
You can connect to the Raspberry Pi using for example SSH to access both camera and motors communication, taking advantage of the operating system and computational power of the board.
OpenCV: image processing
OpenCV is an image processing library, which:
- Is Open-source
- Allows for easy image capturing and accessing
- Is well documented and easy to use
- Contains many out of the box image analysis algorithms
